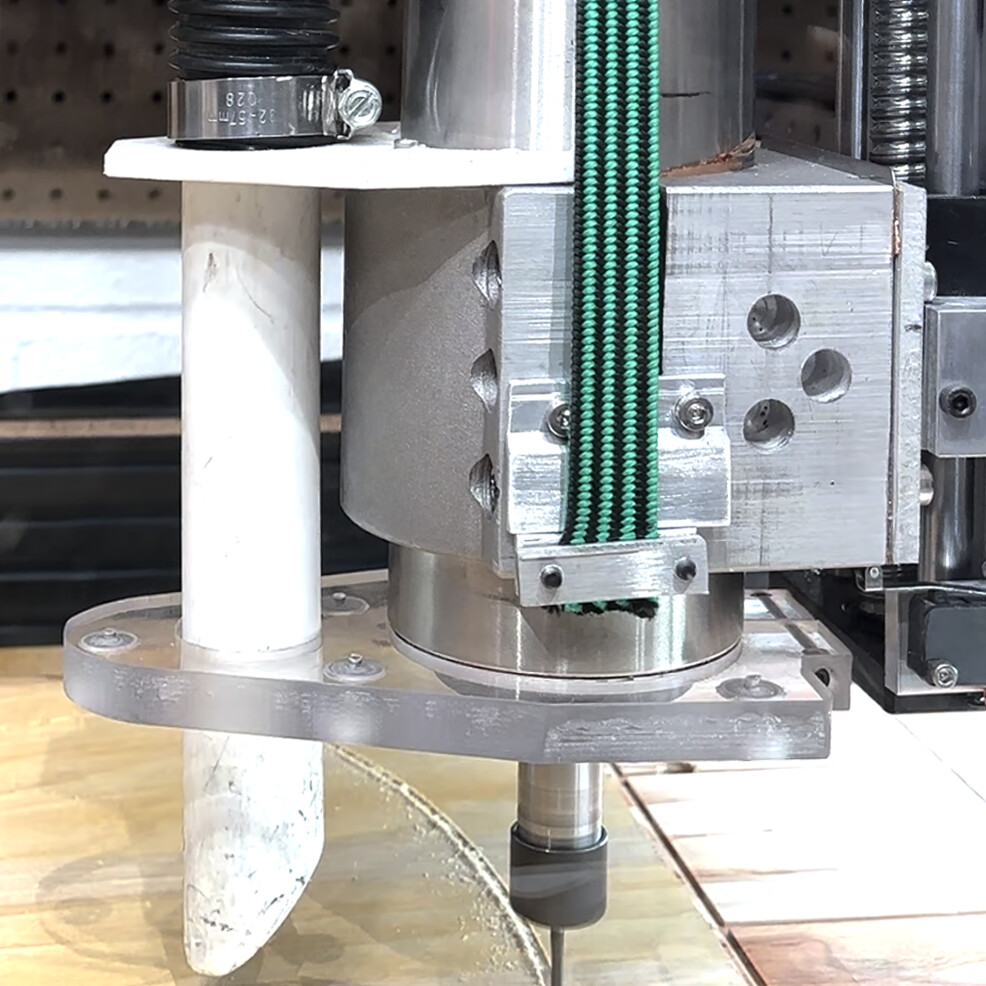
I am no expert. I built my own CNC, and am using the SLB as my current controller. I began with a pretty weighty 1.5KW water cooled spindle. I had also built the machine with 4.2A Nema 23 steppers with a 36v power supply with an Arduino-based controller using external Stepper drivers. So, there should have been plenty of torque to hold the Z axis up. This wasn’t the case though. I tried several things to combat gravity, but ultimately, I added a mechanical fix. It’s not elegant. It’s basically a bungee support on both sides of the Z carriage. It’s not perfect, but it keeps things within a tolerable range – for me. It assists the stepper when lifting the spindle. I was concerned switching to the SLB because the onboard drivers are not a high current as the external drivers I have been using – so probably not as much torque. A good thing about the bungee system is I can retention it if I find steps are missing. I know some industrial machines have electromagnetic, and spring systems. This is my cheap “cowboy” engineering solution.
I found a lot of people have these issues when adding bigger spindles. Here is a link to one solution by another cncer: https://forum.onefinitycnc.com/t/z-axis-counter-balance-for-the-journeyman-elite-2-2kw-spindle/21398.