G-sender version 1.4.6 for SLB defaults to 19.753 degrees for setting $102. Is this correct or is there a way to calculate a different setting? Also is there a master list somewhere that defines what all the setting do besides the short description is each $ setting? Thanks in advance.
Did you mean $103? $102 is Z-axis travel resolution, not A-axis resolution.
19.753 is the correct value for the Vortex at least - it would change if you’re running a different rotary. $100-$103 are all calibration values for the 4 axes, and compensate for the leadscrew pitch or belt teeth/mm, microstepping, and stepper motor resolution.
This thread goes through the process of calculating $103 manually - but again, if you’re using the Vortex, the value you listed is correct.
Interesting reply as the other settings in that range defaulted to 800
That included $103 was 800 and 102 was the 19.753 as I originally stated by mistake
I’m not sure how it’s an interesting reply when that’s the correct value. We’ve explained how we determined the value below - but to save you some time, 2.469 / (1 / 8) = ~19.753.
I think you’re confusing two different settings and I need you to figure out the exact setting ID number if you want help because $102 has nothing to do with rotary either as 4-axis or rotary mode. I think you mean $101 (y-axis resolution) since that’s the setting that’s relevant when swapping between true 4-axis and rotary modes.
The below is off the assumption that you mean $101 (Y resolution), not $102 (Z resolution). I’m assuming this because it’s the only way what you’re saying makes sense.
Default values for the SLB (as in, you just hit reset defaults in the firmware tool, haven’t toggled rotary mode) are as follows:
A - $103: 19.753
Y - $101: 800
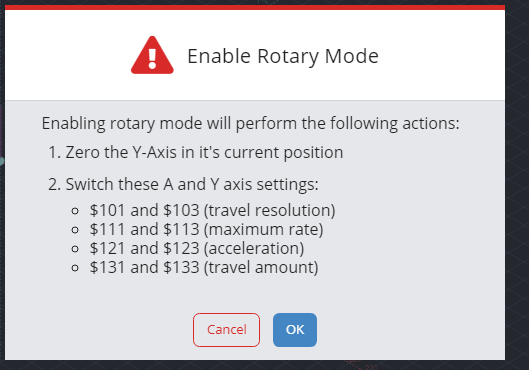
Swapping to rotary mode (using the toggle within the rotary widget) inverts these since it hijacks Y axis. So it swaps the two values.
A - $103 : 800
Y - $101 : 19.753
This is expected behaviour - we want the Y which is controlling the rotary to act as A so change the resolution to match the A-axis resolution and since we’re not using the A value we can store the old value there. In fact, when you toggle on rotary mode, it specifically tells you this is what it is doing
I think your confusion stems from 2 points:
-
Default value for A-axis wildly differs from normal motor resolution since it has to account for stepping around 360 degrees and is tuned much lower. I’ve linked above how this value was determined.
-
Default values are swapping when you toggle on rotary mode between A- and Y- specific EEPROM settings because rotary mode hijacks Y to use as A.
Thank you. Makes more sense to me now.